- 单个网络
- 将 bounding box 的输出离散为默认框 anchor
, - 对每个默认框打分
, - 结合不同分辨率的预测来处理多尺寸的问题
此前已经用过的技巧·
- 金字塔结构
, , - 采用 anchor box
- 将 feature map 分成许多格子
,
- 将 feature map 分成许多格子
网络结构·
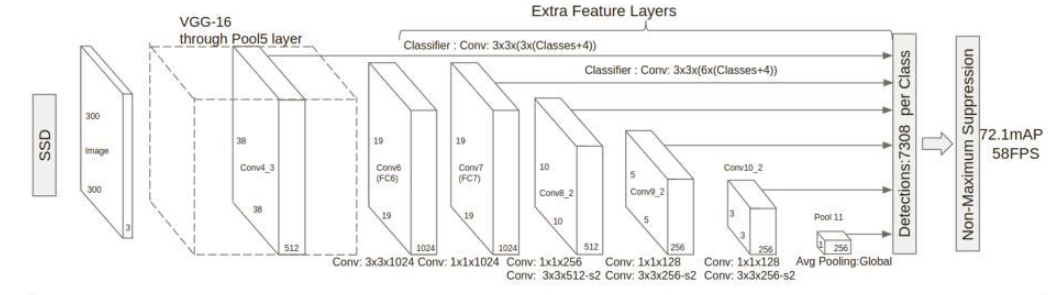
Atrous Algorithm( 、 )
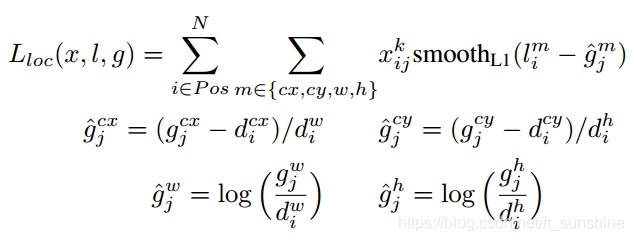
损失函数·
和Faster RCNN的基本一样
数据扩增·
为了使模型对各种输入目标大小和形状更鲁棒